DYNABAL: Precision Force Sensor
Mechanism Design · Flexible Mechanisms · CAD · SolidWorks · Mechanical Analysis · Precision Engineering
Overview
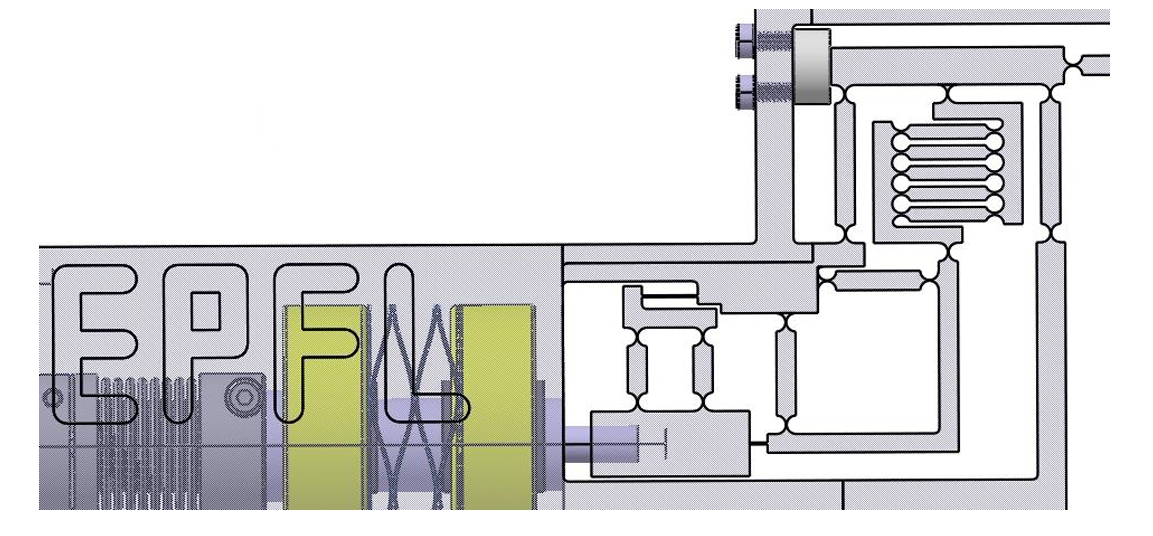
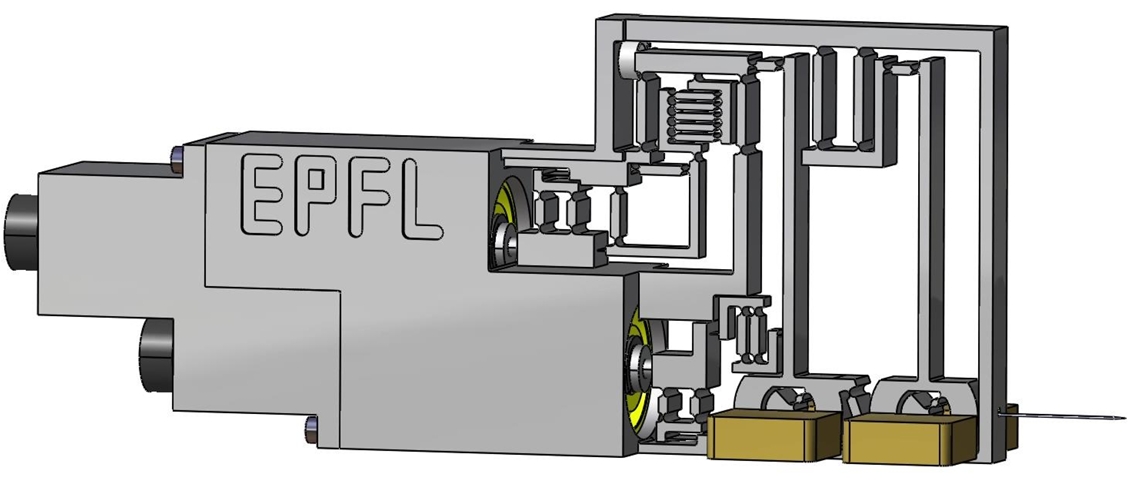
This 'Conception de mécanisme II' project focused on the design of a dynamically balanced force sensor (DYNABAL) with adjustable stiffness using flexure-based mechanisms. The goal was to achieve very high force resolution by enabling near-zero stiffness, while also being insensitive to gravity and inertial forces for dynamic measurement scenarios.
My Role
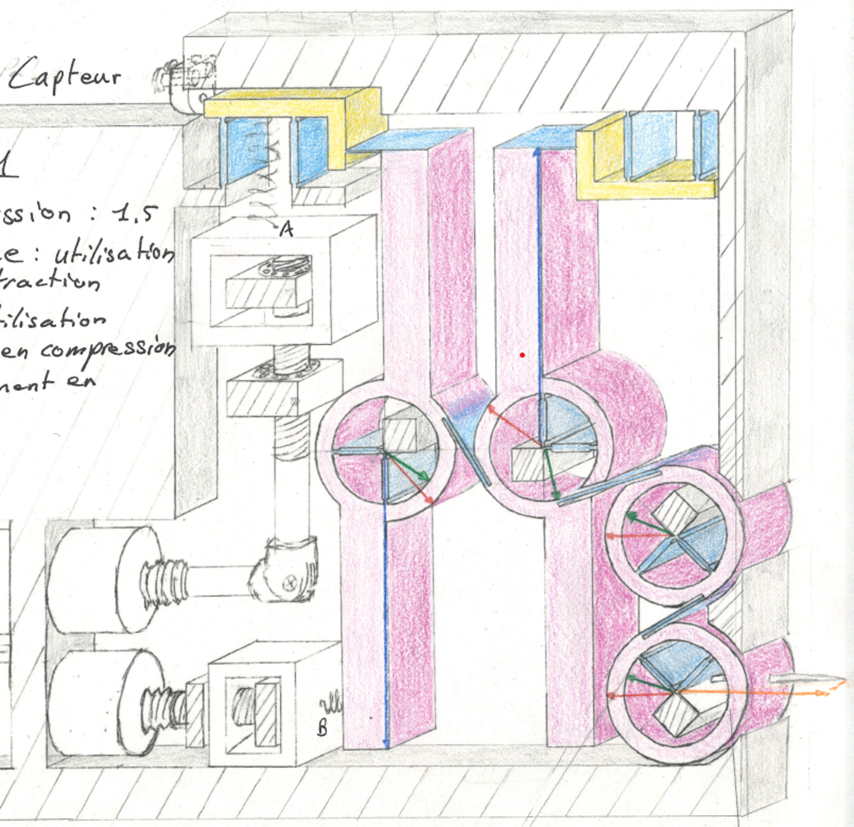
- Contributed to the conceptual design, including the flexible pivot system, lever arms for transmission, and stiffness compensation mechanism.
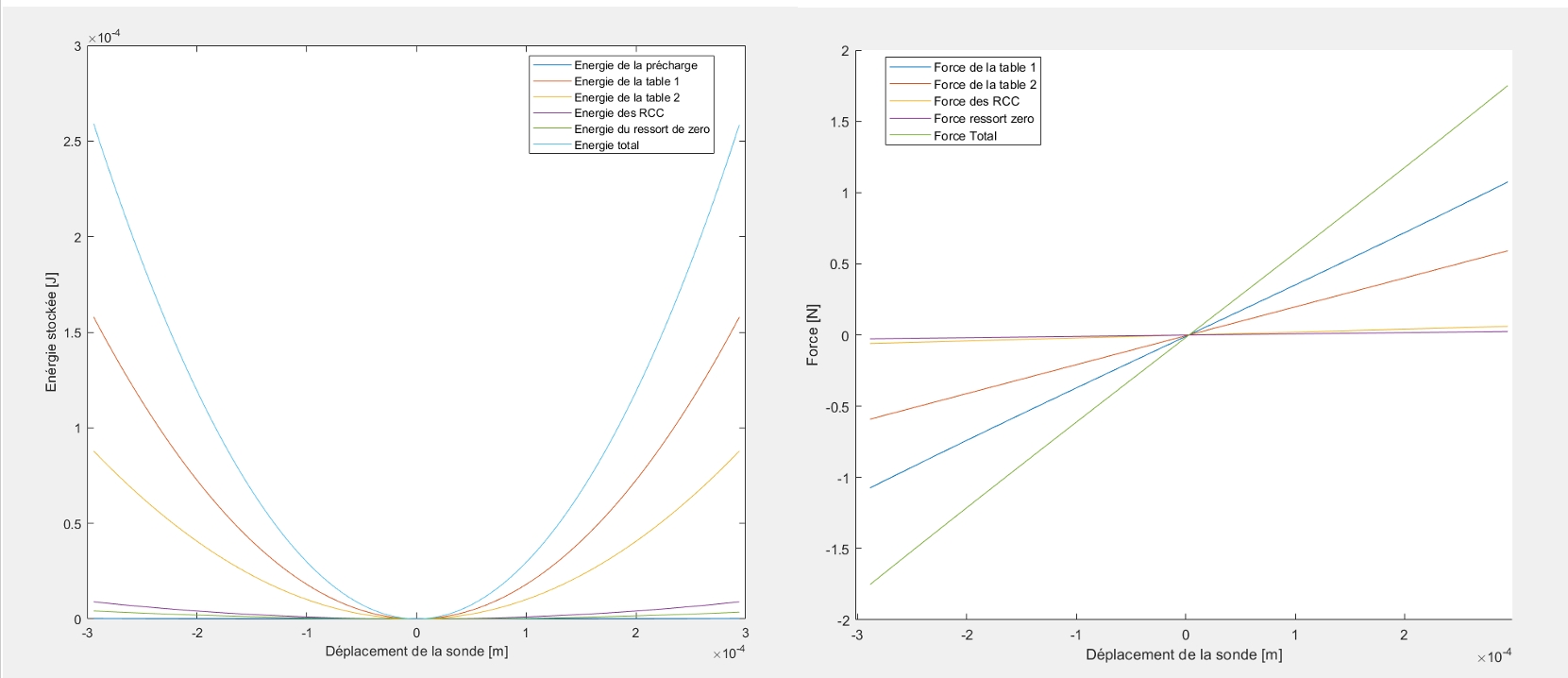
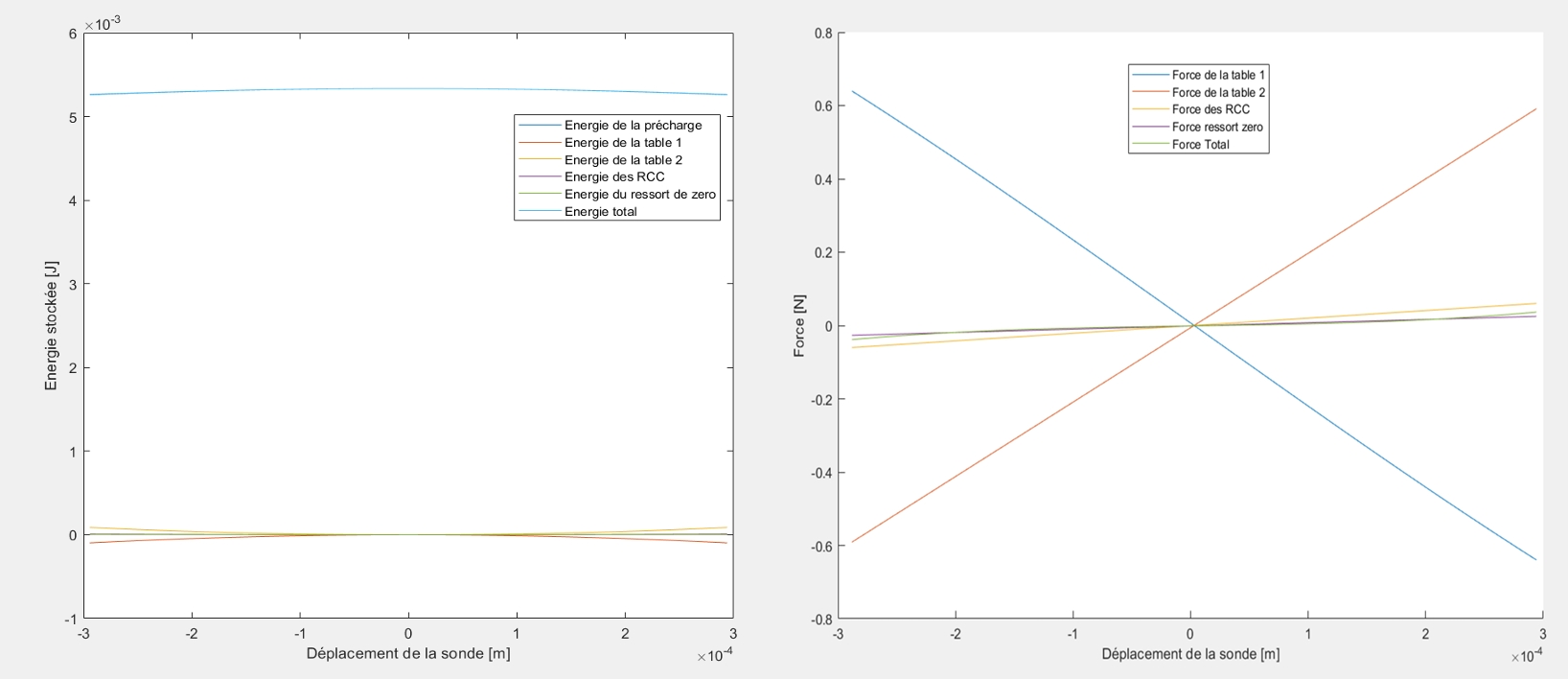
- Performed analytical calculations for mobility, stress analysis on flexures, and determination of the range of adjustable stiffness (5.95 N/m to 3400 N/m).
- Involved in the design of the motor-driven preload and zero-adjustment systems, including vis-écrou mechanisms.
- Participated in material selection (Ti-6Al-4V for monolithic flexure body) and considered manufacturability aspects for electroerosion.
Challenges
- Designing a mechanism to achieve a wide range of stiffness, including near-zero, using only flexures.
- Ensuring dynamic balancing of moving parts within a monolithic structure.
Outcomes
- A detailed mechanical design for the DYNABAL sensor capable of a wide stiffness adjustment range (kmin ≈5.95N/m, kmax ≈3400N/m).
- Calculated a theoretical force measurement resolution down to approx. 288 nN and a maximum measurable force of 1.72 N, yielding a high virtual dynamic range.
- The design ensured all flexures operate within the material's elastic limit under maximum deflection.
Figures