Project 05
Real-Time Steer-by-Wire Control
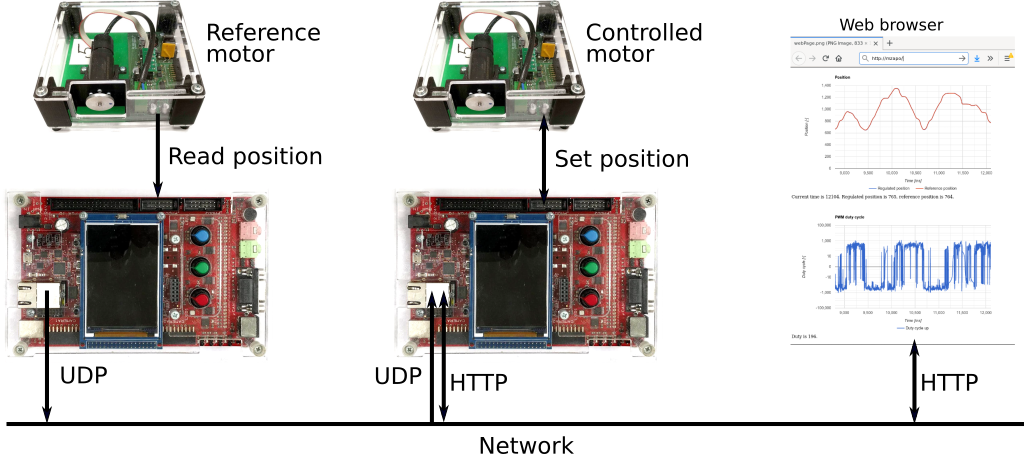
Developed a steer-by-wire system where one motor's position, transmitted via UDP, precisely dictates the position of a second motor controlled by an STM32 with a PID controller. Featured live web-based data visualization.
C, STM32, Embedded Systems, PID Control, Anti-Windup, PWM, UDP Sockets, HTTP, SVG, Git