Advanced Model Predictive Vehicle Control
MATLAB · Simulink · CasADi · YALMIP · MPT3 · Gurobi · Control Systems · State Estimation

Overview
This ME-425 course project involved developing various MPC strategies to control a vehicle's longitudinal and lateral motion on a highway. The project covered linearization of a nonlinear model, designing controllers for tracking, disturbance rejection, and handling uncertainty, including adaptive cruise control and nonlinear overtaking maneuvers.
My Role
- Co-derived analytical linearized models and analyzed system decomposability.
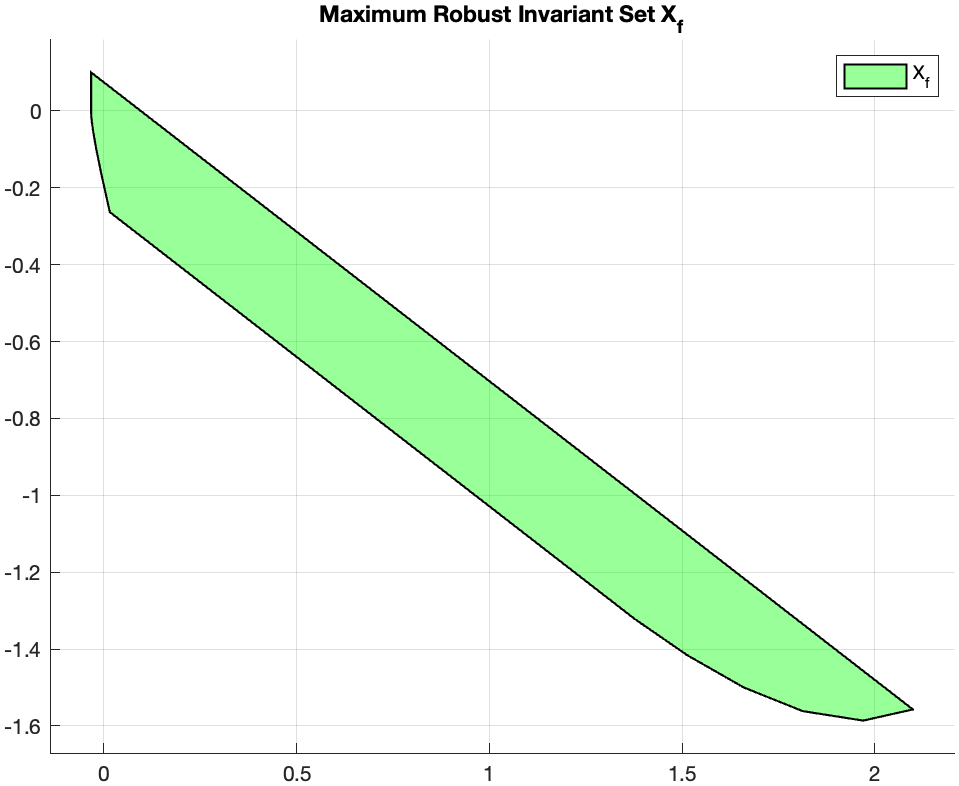
- Designed and tuned linear MPCs for subsystems, implementing terminal sets for stability and recursive constraint satisfaction.
- Developed an offset-free tracking controller incorporating a state estimator to reject disturbances.
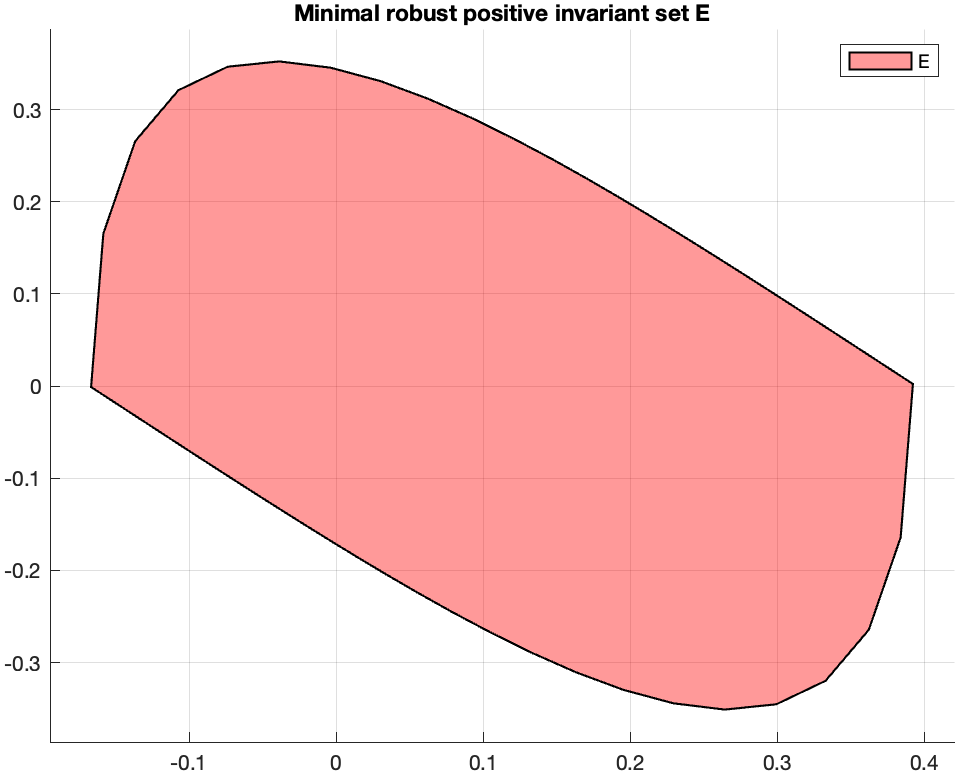
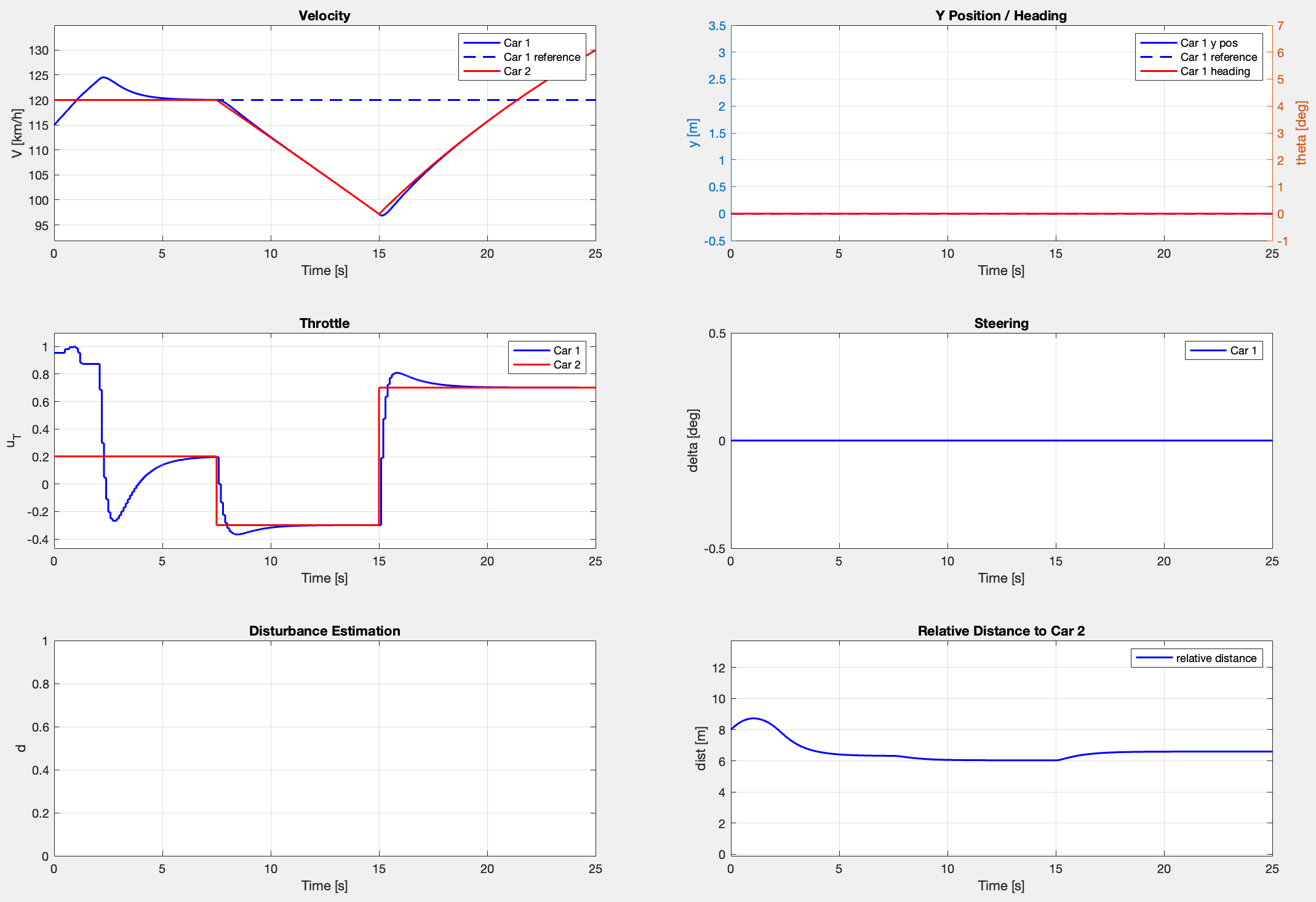
- Implemented a robust tube MPC for adaptive cruise control, calculating invariant sets and tightened constraints.
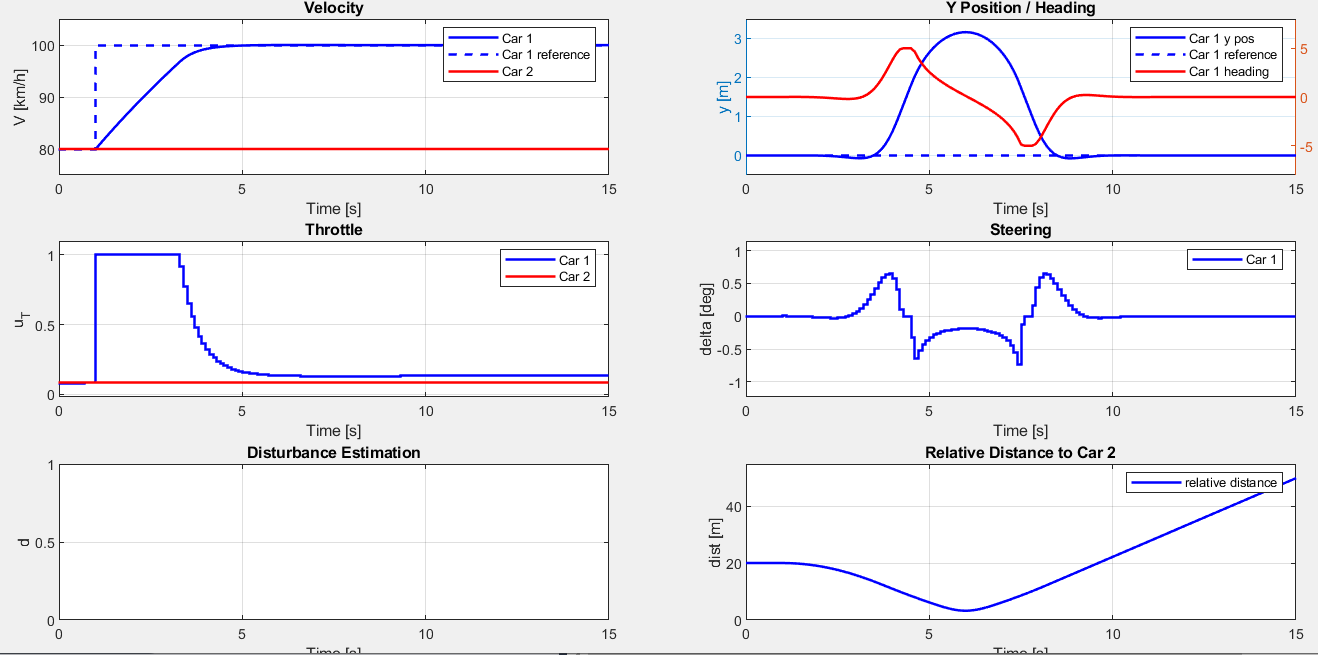
- Designed a Nonlinear MPC (NMPC) in CasADi with RK4 discretization for complex maneuvers like overtaking, including collision avoidance.
Challenges
- Ensuring stability and constraint satisfaction across different MPC formulations.
- Handling model uncertainties and disturbances effectively (e.g., in lead car behavior).
Outcomes
- Successfully simulated controllers that met performance requirements for reference tracking, lane changes, and settling times.
- Demonstrated robust adaptive cruise control maintaining safe distances under lead car uncertainty.
- Achieved successful overtaking maneuvers with the NMPC controller, respecting collision avoidance constraints.
Figures